|
TH-2 XPR Software Support -
Tandem Rotor Helicopter Software
TH-2 XPR Tandem Rotor Software
TH-2 XPR Tandem Software Users Guide
Topic Index
Tandem Control Software Specifications
Radio Settings
Software Control Settings
Tandem Control Software General Information
Tandem Control Software Flight Controls
Tandem Control Software Specifications
Version: TH-XPR-4 Tandem helicopter control
software
| CCPM Mixing
types |
Supports 2, 3
and 4 point |
|
|
| Number of
servo outputs |
8 total, 4
front and 4 rear |
|
|
| Servo
reversing |
All 8 outputs |
|
|
| Servo
centering |
All 8 outputs
with +/- 12.5% travel |
|
|
| Required
inputs |
4, Aileron,
Elevator, Rudder, Pitch |
|
|
| Optional
inputs |
1, CH5 used as
DCP input source |
|
|
Input gain
control
internal |
6, Aileron,
Elevator, Rudder, Pitch, CH5 (DCP) with 0 to 100% range;
Elevator as DCP source +/- 100% range
|
|
|
Input gain
control
external |
5, PT1..PT4
and the X input with 0 to 100% range |
|
|
| Yaw
compensation |
Enable/Disable
control; Input is elevator with gain +/- 50% |
|
|
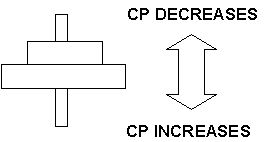
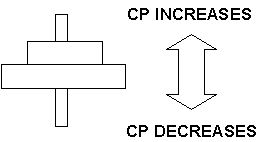
| CP layout
control |
Select
swashplate up/down will increase/decrease CP |
|
|
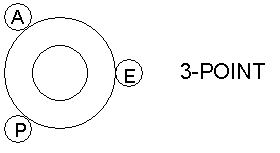
| Front
swashplate layout |
Select the E
servo to face front/rear (3-point only) |
|
|
| Rear
swashplate layout |
Select the E
servo to face front/rear (3-point only) |
|
|
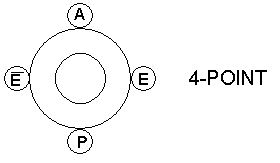
| CCPM mixing
type |
Select 3 or 4
point mixing |
|
|
| Yaw Filter
(low pass) |
Select off,
low, medium, high |
|
|
|
Tx Frame Sync |
User setting that can
be any combination of inputs - default is the pitch input |
|
|
Control axis swash plate
movements:
Roll - Left/right
tilt of both swash plates.
Pitch - For/aft tilt of
both swash plates plus a blend of DCP (differential Collective Pitch) of
both swash plates.
Yaw -
Differential left/right tilt of both swash plates.
Vertical - Symmetric Collective Pitch change of both swash plates.
Note:
DCP input is a program mix (Transmitter) with Elevator master and
CH5 as slave.
Radio Settings
This section describes what the settings
in your transmitter should be.
In general, start off with the servo travel (travel volume, end point, etc.)
set to 100% for aileron, elevator, rudder, pitch and CH5.
This will give you a good starting point. Servo reversing will
depend on how you installed your servos and the brand as well.
All CCPM swashplate mixing must be turned off in the Tx. Initially, all
other mixing functions should be turned off as well.
After you have things working, you can then add programmable mixes
done by the TX.
Software Control Settings
The TH-2 XPR Tandem Control Software uses
control settings as programmable parameters to allow customization
for many different applications and model types. These control
settings can be modified, loaded, saved and shared
with other users using our Tech Link software. Details of the control
settings are listed below.
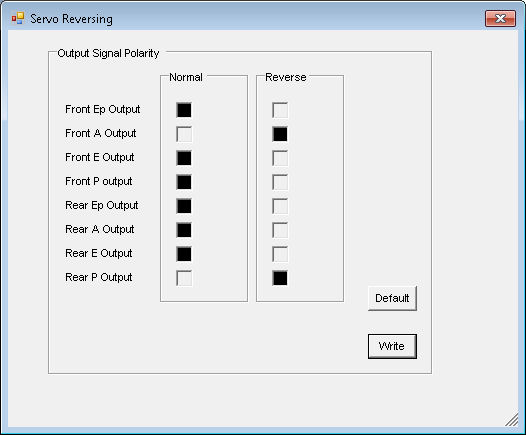
Servo Reversing
Modify Settings - 1
Functions:
- Set servo direction normal/reverse.
Each of the eight servo outputs can be
reversed individually.
This function works in addition to the reversing done in the transmitter.
Click on a box to select.
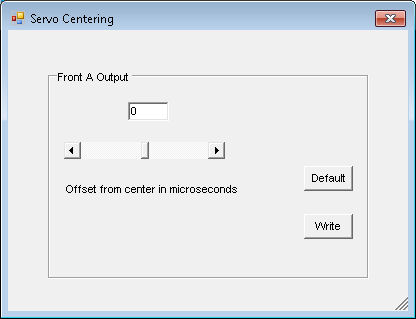
Servo Centering
Modify Settings - 2..9
2 - Servo Centering Front Ep
Output
3 - Servo Centering Front A Output
4 - Servo Centering Front E Output
5 - Servo Centering Front P Output
6 - Servo Centering Rear Ep Output
7 - Servo Centering Rear A Output
8 - Servo Centering Rear E Output
9 - Servo Centering Rear P Output
Functions:
- Set servo centering position
-12.5..12.5 percent (-125 ...125 microseconds)
Each servo output center (servo neutral
position) can be adjusted by+/- 12.5 percent.
This function works similarly to sub-trims in the transmitter.
Click on an arrow button or drag the slider to change.
DCP Input Source/Gain
Modify Settings - 10
Functions:
- Select DCP input source
- Adjust gain -100..100 percent
The DCP function can have it's source come
from the CH5 input or from the elevator input.
The best choice is to have CH5 as the DCP input which will give the most
flexabilty.
Elevator input selected as the source:
The gain is set by the internal gain setting in this dialog.
Note that the gain is bipolar which allows the DCP function to work the
same or opposite as the elevator.
The DCP function uses the raw elevator input without the elevator input
gain applied so the two functions
operate independently.
CH5 input selected as the source:
The gain source selection and internal gain setting are done in dialog "18
DCP Channel Input Gain (CH5)"
When CH5 is the DCP source, its more flexible since CH5 can be a slave mix
off the elevator channel with the
mixing done in the transmitter (Tx) which allows the mixing gain to be
easily set in Tx and the DCP input gain set internally.
Another approach is to use an external gain source, PT1..PT4 or the X
input to set the DCP input gain.
Note: One or more input gains can be set to the same external gain source.
For this software, all five external gains have a positive range of 0..100
percent.
The internal gain settings can only be set via USB with Tech-Link.
| |
|
|
| |
 |
|
| |
|
|
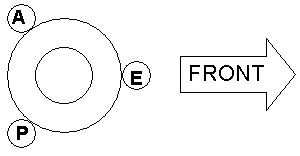
Front Swashplate Servo Layout (3-point)
Modify Settings - 11
Functions:
- Selects position of the E servo
The front swashplate layout can have two
possible configurations where the E servo is in the front or in the rear.
This setting only applies to the 3-point swashplate selection in dialog
"19 CCPM Mixing Type".
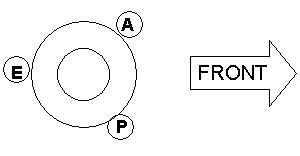
Rear Swashplate Servo Layout (3-point)
Modify Settings - 12
Functions:
- Selects position of the E servo
The rear swashplate layout can have two
possible configurations where the E servo is in the front or in the rear.
This setting only applies to the 3-point swashplate selection in dialog
"19 CCPM Mixing Type".
Collective Pitch Layout
Modify Settings - 13
Functions:
- Select CP swashplate movment
This setting specifies the direction which
the front/rear swashplates movement (up/down) changes the collective pitch
to increase or decrease. Both swashplates must move the same way.
Aileron Channel Input Gain
Modify Settings - 14
Functions:
- Adjust internal gain 0..100 percent
- Select gain source
The input gain source can be selected as
internal or to one of the external sources - PT1..PT4 or the X input.
The internal setting is only active when the source is set to internal.
Internal gain settings can only be set via USB with Tech-Link.
Note: One or more input gains can be set to the same external gain source
(shared).
It is your choice on how to assign them. Write down your settings
for use when away from the PC.
For this software, all five external gains have a positive range of 0..100
percent.
Elevator Channel Input Gain
Modify Settings - 15
Functions:
- Adjust internal gain 0..100
percent
- Select gain source
The input gain source can be selected as
internal or to one of the external sources - PT1..PT4 or the X input.
The internal setting is only active when the source is set to internal.
Internal gain settings can only be set via USB with Tech-Link.
Note: One or more input gains can be set to the same external gain source
(shared).
It is your choice on how to assign them. Write down your settings
for use when away from the PC.
For this software, all five external gains have a positive range of 0..100
percent.
Rudder Channel Input Gain
Modify Settings - 16
Functions:
- Adjust internal gain 0..100
percent
- Select gain source
The input gain source can be selected as
internal or to one of the external sources - PT1..PT4 or the X input.
The internal setting is only active when the source is set to internal.
Internal gain settings can only be set via USB with Tech-Link.
Note: One or more input gains can be set to the same external gain source
(shared).
It is your choice on how to assign them. Write down your settings
for use when away from the PC.
For this software, all five external gains have a positive range of 0..100
percent.
Pitch Channel Input Gain
Modify Settings - 17
Functions:
- Adjust internal gain 0..100
percent
- Select gain source
The input gain source can be selected as
internal or to one of the external sources - PT1..PT4 or the X input.
The internal setting is only active when the source is set to internal.
Internal gain settings can only be set via USB with Tech-Link.
Note: One or more input gains can be set to the same external gain source
(shared).
It is your choice on how to assign them. Write down your settings
for use when away from the PC.
For this software, all five external gains have a positive range of 0..100
percent.
DCP Channel Input Gain (CH5)
Modify Settings - 18
Functions:
- Adjust internal gain 0..100
percent
- Select gain source
The input gain source can be selected as
internal or to one of the external sources - PT1..PT4 or the X input.
The internal setting is only active when the source is set to internal.
Internal gain settings can only be set via USB with Tech-Link.
Note: One or more input gains can be set to the same external gain source
(shared).
It is your choice on how to assign them. Write down your settings
for use when away from the PC.
For this software, all five external gains have a positive range of 0..100
percent.
CCPM Mixing Type
Modify Settings - 19
Functions:
- Select 3-Point (120 degree)
- Select 4-Point (90 degree)
This software supports 2, 3 and 4 point
CCPM mixing. For 3 or 4 point mixing just select your choice from
the menu.
For 2 -point, which has no elevator control, It can be done by two
methods.
- 3 servo method - Select 3- point mixing
and set the elevator channel input gain (menu 15) to zero.
- 2 servo method - Select 4- point mixing
and just use the A and P servos.
Yaw Compensation
Modify Settings - 20
Functions:
- Enable/Disable
- Adjust gain -50..50 percent
This feature provides mixing between the
elevator (master) and rudder function.
It is only useful when elevator is selected as the input to the DCP
function, see dialog 10 DCP Input Source/Gain.
It provides a proportional offset to yaw to help compensate for the torque
imbalance caused when DCP is applied.
Note that the gain is bipolar which allows the yaw function to work the
same or opposite as the elevator.
In a tandem, the control power in the yaw axis is weaker and responds
much slower than in a standard heli with
a tail rotor.
DCP creates torque changes which results in yaw
changes too quick for the gyro and two rotor disks
to keep up with.
Yaw compensation is applied at the same time the DCP
is changed thus almost canceling any
yaw before it happens.
Think of it as pro-action instead of reaction.
A gain setting around 20 to 30 percent is
what should be needed.
Notice the gain can be adjusted by +/- 50 percent, the +/- is to accommodate
different main rotor rotations (CW or CCW).
For a CW rotating front rotor, a forward stick input will reduce front
rotor pitch, increase rear rotor pitch thus creating
a CW torque moment.
To correct, left yaw should be applied.
So, setup the yaw compensation to apply left yaw
when forward stick is commanded.
Yaw Channel Digital Filter
Modify Settings - 21
Functions:
- Filter settings 0= off, 1= low,
2= medium, 4= high
This feature helps to reduce noise on the
rudder input. Averaging is done with previous samples to produce
a low pass filter function. The response of the rudder servo will slow
down noticably as a side effect with
the higher settings. In most cases, it won't effect the flight performance
since yaw is very docile in tandem
helicopters.
Start at the low setting
first and proceed carefully since the gyro function
will be dampened (less responsive).
Tx Frame Sync Mask
Modify Settings - 22
Functions:
- Tx Frame Sync Mask 1..31 (16
default)
This setting tells the TH-2 when the Tx
frame is completed and to begin processing the input data.
Choose the mask value that has all of the inputs that you are using.
This setting is intended for newer FBL units that output servo data
simultaneously rather than sequentially.
If your setup uses sequential outputs (PPM)
you should use the default value of 16 which triggers off of the pitch
channel.
| Mask Value |
Inputs
|
| |
Aileron |
Elevator |
Rudder |
Channel 5 |
Pitch |
| 1 |
* |
|
|
|
|
| 2 |
|
* |
|
|
|
| 3 |
* |
* |
|
|
|
| 4 |
|
|
* |
|
|
| 5 |
* |
|
* |
|
|
| 6 |
|
* |
* |
|
|
| 7 |
* |
* |
* |
|
|
| 8 |
|
|
|
* |
|
| 9 |
* |
|
|
* |
|
| 10 |
|
* |
|
* |
|
| 11 |
* |
* |
|
* |
|
| 12 |
|
|
* |
* |
|
| 13 |
* |
|
* |
* |
|
| 14 |
|
* |
* |
* |
|
| 15 |
* |
* |
* |
* |
|
| 16 |
|
|
|
|
* |
| 17 |
* |
|
|
|
* |
| 18 |
|
* |
|
|
* |
| 19 |
* |
* |
|
|
* |
| 20 |
|
|
* |
|
* |
| 21 |
* |
|
* |
|
* |
| 22 |
|
* |
* |
|
* |
| 23 |
* |
* |
* |
|
* |
| 24 |
|
|
|
* |
* |
| 25 |
* |
|
|
* |
* |
| 26 |
|
* |
|
* |
* |
| 27 |
* |
* |
|
* |
* |
| 28 |
|
|
* |
* |
* |
| 29 |
* |
|
* |
* |
* |
| 30 |
|
* |
* |
* |
* |
| 31 |
* |
* |
* |
* |
* |
Tandem Control Software General Information
- The TH-2 synchronizes with the pitch
channel (CH-6 on most radios) and expects it to be the last pulse
(that it "sees")
in the data frame sent by the transmitter. Also, A gyro should not
be used on this channel.
- When setting up the DCP it helps to turn
off the elevator cyclic component to visualize it better. This can
be done by temporarily setting the gain to zero (0) in the Tech Link
modify settings menu 13.
-
When an input gain
is set to 100% the pulse data from the TX is used as is and mixed. At
50%, the pulse
data from the TX is cut in half and then mixed and so on. Reducing
the gain in the TH-2 when needed,
like for DCP, is better than doing it in the TX (ATV setting)
since this would reduce the overall dynamic range.
-
The gain settings
also allow you to balance the amount of servo travel from the
contributing channels and
prevents clamping. The TH-2 is set to clamp at 0.90 ms min. and 2.10
ms max. to prevent servo damage
in the event of interference.
Tandem Control Software Flight Controls
The TH-2 XPR provides four basic flight
controls - Yaw, Pitch, Roll and Vertical ascent/decent.
These controls map to the familiar transmitter joysticks layout
(mode 2).
-
Yaw - Left transmitter joystick LEFT/RIGHT.
-
Vertical ascent/decent - Left transmitter joystick
UP/DOWN.
-
Roll - Right transmitter joystick LEFT/RIGHT.
-
Pitch - Right transmitter joystick UP/DOWN.
Yaw Control
The TH-2 performs yaw control by tilting
the front and rear swashplates differentially along the roll axis.
Roll Control
The TH-2 performs roll control by
tilting the front and rear swashplates along the roll axis.
Vertical Ascent/Decent Control
The TH-2 performs Vertical ascent/decent
control by increasing/decreasing the front and rear rotor pitch
collectively (each the same).
This is known as collective pitch.
Pitch Control
The TH-2 performs performs Pitch control
by increasing/decreasing the front and rear rotor pitch
differentially.
This is known a Differential Collective Pitch (DCP).
It also blends in for/aft cyclic with the ratio determined by the
gain settings.
Copyright © 2019 by Tech Model
Products LLC. • All Rights Reserved |